
Description
In order to create more natural motion in prosthetic devices, the relation between the oft-used EMG signals and the mechanical motion of the limb needs to be better understood. This relationship grows in complexity with multiple fingers and complicated motions.
This project presents a device designed to measure the force, position, and velocity of each finger independently for comparison with EMG data. Data from a representative test were presented, and a method of predicting the force of each finger was shown, with the resulting prediction generally following the measured force profile.
This design will allow improved data to be independently gathered from more fingers, representing more complex motions of the hand, helping the EMG-motion relation to be comprehended more fully.
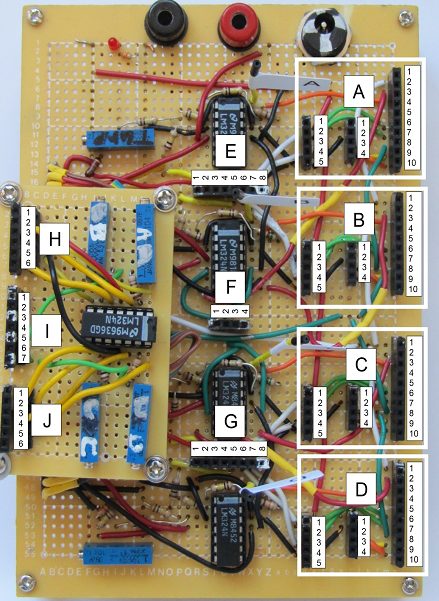
Circuit with all connectors labeled
All four devices have different gains in Force control mode in order to run more smoothly. If uploading new code to all Arduinos, remember to put in the correct gain by changing the value of the pgainForce variable in the Global variables section.
This code has a document (116 pages) which describe the algorithm in detail.
REFERENCES
Advanced Motion Controls. “Analog Servo Drive BD15A8.” Advanced Motion Controls. n.d. http://www.a-m-c.com/download/datasheet/bd15a8.pdf (accessed January 4, 2010).
—. “PS2X3 and PS4X3 Series.” Advanced Motion Controls. n.d. http://www.a-mc.com/download/datasheet/ps2x3h24.pdf (accessed January 4, 2010).
Almström, Christian, and Peter Herberts. “Control of multifunctional prosthetic hands using pattern recognition technique.” (International Journal of Rehabilitation Research) 1, no. 3 (1978).
Andersen, Richard A., Eun Jung Hwang, and Grant H. Mulliken. “Cognitive Neural Prosthetics.” (Annual Review of Psychology) 61 (2009).
Arduino. Arduino Language Reference. n.d. http://arduino.cc/en/Reference/HomePage (accessed June 15, 2010).
Arduino IDE. Arduino Duemilanove. n.d. http://www.arduino.cc/en/Main/ArduinoBoardDuemilanove (accessed June 15, 2010).
Baker, Justin J., Erik Scheme, Kevin Englehart, Douglas T. Hutchinson, and Bradley Greger. “Continuous Detection and Decoding of Dexterous Finger Flexions With Implantable MyoElectric Sensors.” IEEE Transactions on Neural Systems and Rehabilitation Engineering 18, no. 4 (August 2010): 424-432.
Baker, Justin J., et al. “Decoding Individuated Finger Flexions with Implantable MyoElectric Sensors.” EMBS Conference. Vancouver, British Columbia, Canada: IEEE, 2008. 193-196.
Baker, Justin, William Bishop, Spencer Kellis, Todd Levy, Paul House, and Bradley Greger. “Multiscale Recordings for Neuroprosthetic Control of Finger Movements.” Minneapolis: IEEE EMBS, 2009.
BeBionic. The Hand Grip Patterns. n.d. http://www.bebionic.com/grip-patterns/ (accessed 11 2011).
Electronic Innovation Corp (EIC). Electronic Innovation Corp (EIC). n.d. http://www.designcircuit.com/ (accessed August 3, 2009).
Farrell, Todd R., and Richard F. ff. Weir. “A Comparison of the Effects of Electrode Implantation and Targeting on Pattern Classification Accuracy for Prosthesis Control.” IEEE Transactions on Biomedical Engineering, 2008.
Herbach and Rademan. 3000 RPM Reversible DC PM Field 12 VDC. n.d. http://www.herbach.com/Merchant2/merchant.mv?Screen=PROD&Store_Code=HAR& Product_Code=TM00MTR4415&Category_Code=MTR (accessed January 4, 2010).
Honeywell. Miniature Load Cells. n.d. http://content.honeywell.com/sensing/sensotec/loadcell.asp?category=mini (accessed January 4, 2010).
Huang, He, Fan Zhang, Yan L Sun, and Haibo He. “Design of a robust EMG sensing interface for pattern classification.” (Journal of Neural Engineering) 7, no. 056005 (2010).
Meek, Sanford G., Stephen C. Jacobsen, and R. Rees Fullmer. “Control Inputs to a Multiple Degree of Freedom Artificial Arm.” IEEE Frontiers of Engineering and Computing in Health Care, 1984: 12.6.1-5.
Micera, Silvestro, Jacopo Carpaneto, and Stanisa Raspopovic. “Control of Hand Prostheses Using Peripheral Information.” IEEE Reviews in Biomedical Engineering, 2010.
Microchip. dsPIC30F4011. n.d. http://www.microchip.com/wwwproducts/Devices.aspx?dDocName=en010337 (accessed February 2010).
Musallam, S., B. D. Corneil, B. Greger, H. Scherberger, and R. A. Anderson. “Cognitive Control Signals for Neural Prosthetics.” Science 305 (2004): 258-262.
Nave, Carl R. Hyperphysics. n.d. http://hyperphysics.phy-astr.gsu.edu/hbase/frict2.html (accessed November 16, 2011).
Nook Industries. 3/8-2 Inch Acme Screw Assemblies. n.d. http://www.nookindustries.com/acme/AcmeInchInfo.cfm?id=8 (accessed January 4,
2010).
—. Acme & Lead Screw Assembly Glossary and Technical Data. n.d. http://www.nookindustries.com/acme/AcmeGlossary.cfm#Backdriving (accessed January 4, 2010).
Ortmann, Valerij, and Boris Kh. Baziyan. “Intracortical Neural Interface for Prosthetic Applications.” Lyon, France: IEEE EMBS, 2007.
Ottobock. SensorHand Speed. n.d. http://www.ottobockus.com/cps/rde/xchg/ob_us_en/hs.xsl/6953.html?id=15060#t150 60 (accessed 11 2011).
PBC Linear. FM Metric Closed Linear Plain Bearing. n.d. http://www.pacificbearing.com/ISOMetricClosedPlaneBearing-FM.aspx (accessed January 4, 2010).
Reaz, M. B. I., M. S. Hussain, and F. Mohd-Yasin. “Techniques of EMG signal analysis: detection, processing, classification and applications.” (Biological Procedures Online) 8, no. 1 (2006).
Scheme, Erik, and Kevin Englehart. “Electromyogram pattern recognition for control of powered upper-limb prostheses: state of the art and challenges for clinical use.” (Journal of Rehabilitation Research and Development) 48, no. 6 (2011).
Schieber, Marc H. “Individuated Finger Movements of Rhesus Monkeys: A Means of Quantifying the Independence of the Digits.” (Journal of Neurophysiology) 65, no. 6 (1991).
Sears, Harold H., and Julie Shaperman. “Proportional Myoelectric Hand Control: An Evaluation.” (American Journal of Physical Medicine and Rehabilitation) 70, no. 1 (1991).
Smith, Ryan J., Francesco Tenore, David Huberdeau, Ralph Etienne-Cummings, and Nitish V. Thakor. “Continuous Decoding of Finger Position from Surface EMG Signals for the Control of Powered Prostheses.” Vancouver, British Columbia: IEEE EMBS Conference, 2008.
Sylvester, Nicholas D. “Friction Perception and Tactile Feedback.” (University of Utah) MS Thesis (2006).
Tenore, Francesco, Ander Ramos, Amir Fahmy, Soumyadipta Acharya, Ralph Etienne-Cummings, and Nitish V. Thakor. “Towards the Control of Individual Fingers of a Prosthetic Hand Using Surface EMG Signals.” Cite Internationale, Lyon, France: IEEE EMBS, 2007.
US Digital. E5 Optical Kit Encoder. n.d. http://usdigital.com/products/encoders/incremental/rotary/kit/e5/ (accessed January 4, 2010).
Zhou, Ping, et al. “Decoding a New Neural-Machine Interface for Control of Artificial Limbs.” (Journal of Neurophysiology) 98 (August 2007): 2974-2982.
https://matlab1.com/shop/matlab-code/matlab-and-arduino-code-for-topbot-robot/

Reviews
There are no reviews yet.