
Description
TopBot was a project created to explore passive stability and open-loop controls as a method of locomotion. The passive stability of top dynamics would be exploited as a way to keep TopBot righted while a hopping mechanism would be explored to allow for a form of locomotion. This allows for not only a computationally simple form of stability but could also be used in instances of lower gravity planets as a form of space exploration where hopping from location to location could provide an energy efficient alternative to rolling or stepping over harsh terrain.
The purpose of TopBot is to instead take a detailed look at a naturally occurring form of stability and exploit its benefits to stabilize a system as well as create a unique form of locomotion.
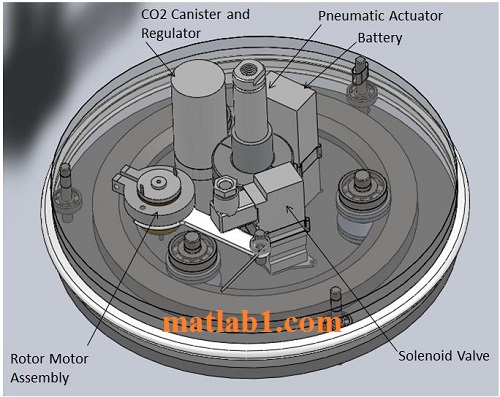
Actuation Systems of TopBot
MATLAB code :
Jump Height and Velocity
Cold Thrust Rocket Calculations
Number of CO2 Canister Shots
Preliminary Spin Speed of Rotor
RK4 Analysis of TopBot
Arduino code :
Nutation Angle from Accelerometer
BIBLIOGRAPHY
Bewley, Thomas. Numerical Renaissance simulation, optimization, and control. San Diego:Renaissance Press, 2012.
Genuine Innovations. Composite Regulator. n.d. 7 May 2012 <http://www.genuineinnovations.com/composite-regulator.html>.
Ginsberg, Jerry H. Advanced Engineering Dynamics Second Edition. New York: Cambridge University Press, 1995.
McMaster-Carr. n.d. 7 May 2012 <http://www.mcmaster.com/>.
Robotics, Honeybee. Power and Signal Transfer. 1999. 23 05 2012
<http://www.honeybeerobotics.com/mechanisms/sliprings>.
SMC Pneumatics Inc. NVK 300 Series. n.d. 7 May 2012
<http://content.smcetech.com/pdf/NVKF300.pdf>.
Arduino and MATLAB code for ultra-lightweight spherical aerial-terrestrial robot
Arduino code for autonomous robotic navigation and obstacle avoidance applications on the Moon

Dominik –
Highest quality code I’ve every received.