
Description
This research is focused on the design of a generic robot for application to robotic surgery, with controls carried out through a laparoscopic instrument with an embedded motion sensor.
Motion sensor data was also successfully processed, filtered, and calibrated to remove noise signals which are necessary steps prior to the application of the signals to robot inverse kinematics. These signal modifications made possible the close replication of the movement of a controller by a robot with minimum error.
The calibration modalities adopted were of two stages. The first ‘noise detection’ precalibration stage identifies both the sources and amplitude of the noise signals through centering and does some pre-filtering. Later on during the real-time signal processing (the second stage), residual noise signals were removed using an optimum moving average value of 5.
To make possible the use of the filtered sensor data, a mathematical model was designed to convert raw, returned data from the gyroscope sensor to Euler angles, and from Euler angles to the Quaternions data which the robot recognizes. For data validation, received orientation data from the sensor for calculation of the end point of laparoscopic instrument was used and compared with received data from robot inverse kinematic procedure to validate the process.
Serial connection through a USB (Universal Serial Bus) port was used for data transfer between micro-controller and a specifically-designed software application. It was also possible to replace it with Bluetooth connection but because of weight of devices and specially the battery need to support wireless connection preferred to use cable connection for the sensor.
In addition to establishing a connection between the micro controller and robot, it was also possible to record and play back dynamic surgical motions in real-time, and for subsequent review and also makes it possible to use the system as a teach and play back system or for data analysis. Robot movements path can also be calculated using this system, which is displayed as a graph with minimal different with the real path of the robot.
Connection between computer software and robot controller is through the TCP/IP and it make it possible to use this system over the internet for teleoperation surgery.
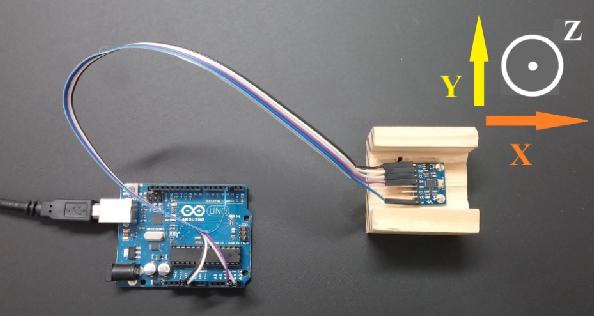
Rotation Cube with Connected Sensor and Axes
BIBLIOGRAPHY
1. A Look at The $2 Million da Vinci Surgical System. http://www.nedhardy.com/. [Online] (2013). http://nedhardy.com/2013/01/19/a-look-at-the-2-million-davinci-surgical-system/.
2. Benefits of Minimally Invasive Procedures. The University of the Chicago Medicin . [Online] (2013). www.uchospitals.edu/specialties/minisurgery/benefits/.
3. Company Overview of Computer Motion, Inc. Bloomberg Businessweek. [Online] http://investing.businessweek.com/research/stocks/private/snapshot.asp?privcapId =26873.
4. da Vinci Training. Intuitive surgical. [Online] intuitive surgical, (2013). http://www.intuitivesurgical.com/training/. PN 874029 Rev B 10/13.
5. Dankelman, J., M. Wentink, and H. G. Stassen. “Human reliability and training in minimally invasive surgery.” Minimally Invasive Therapy & Allied Technologies12.3-4 (2003): 129-135.
6. Development of Robotic Procedures. http://www.lap-surgery.com/. [Online] (2013) Department of Gastrointestinal Surgery.
7. Euler angles. Wikipedia. [Online] (2014). http://en.wikipedia.org/wiki/Euler_angles.
8. Frequency Asked Questions. Intuitive Surgical. [Online] http://www.intuitivesurgical.com/products/products_faq.html#18. PN 874080 Rev
A 08/10.
9. Gimbal Lock. Wikipedia. [Online] (2014). http://en.wikipedia.org/wiki/Gimbal_lock.
10. IRB 140 – Small, powerful and fast 6-axes robot. ABB. [Online] http://new.abb.com/products/robotics/industrial-robots/irb-140.
11. Language Reference. Arduino Reference. [Online] http://arduino.cc/en/Reference/HomePage.
12. Medical Post. (1985), Medical Post, p. 23.
13. Morais, J. P., Georgiev, S., & Sprößig, W. (2014). Quaternions and Spatial Rotation. In Real Quaternionic Calculus Handbook (pp. 35-51). Springer Basel.
14. Principles of Motion Sensing. InvenSense. [Online] http://www.invensense.com/mems/principles.html.
MATLAB and Arduino C++ code for microfluidic DNA analysis systems

Manon –
I would like to appreciate your work.