
Description
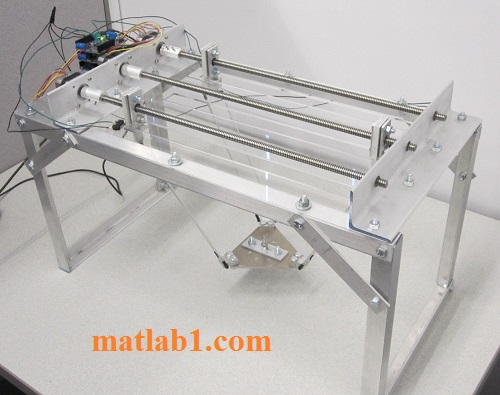
In order to verify the kinematics equations, a physical LDR was constructed. The prismatic joints were created from threaded sliders on lead screws, actuated by stepper motors.
Ball and socket joints were used for the spherical joints. Kinematics calculations and motor control are performed with an Arduino Uno, which receives position commands via USB cable from a serial messenger, in this case a laptop computer. This position command was then converted to a linear distance for each slider, which in turn was converted to a number of ticks for each stepper to rotate. Positional data is stored on the Arduino EEPROM, which retains the information even when power is disconnected. Contact switches were placed along the slider track at known locations, allowing the robot to be reset to a known position should the positional data get corrupted or lost. Figure 1 shows the constructed LDR.
Linear Delta Robot
LIST OF REFERENCES
[1] M. J. Uddin, S. Refaat, S. Nahavandi and H. Trinh, “Kinematic Modelling of a Robotic Head with Linear Motors,” Deakin University, School of Engineering and Technology, Geelong.
[2] R. Clavel, “A Fast Robot with Parallel Geometry,” in 18th International Symposium on Industrial Robotics, Lausanne (Switzerland), 1998.
[3] R. Clavel, “Device for the positioning of an element in space”. U.S. Patent 4,976,582, 11 Dec 1990.
[4] M. Stock and K. Miller, “Optimal Kinematic Design of Spatial Parallel Manipulators: Application to the Linear Delta Robot,” ASME Journal of Mechanical Design, vol. 125, 2003.
[5] Q. Yuan, S. Ji, Z. Wang, G. Wang, Y. Wan and L. Zhan, “Optimal Design of the Linear Delta Robot for a Prescribed Cuboid Dexterous Workspace based on Performance Chart,” in WSEAS Int. Conf. on Robotics, Control, and Manufacturing Technology, Hangzhou, 2008.
[6] X.-J. Liu, J. Wang, K.-K. Oh and J. Kim, “A New Approach to the Design of a DELTA Robot with a Desired Workspace,” Journal of Intelligent and Robotic Systems, vol. 39, pp. 209-225, 2004.
[7] Y. Zhao, “Dynamic optimum design of a three translational degrees of freedom parallel robot while considering anisotrophic property,” Robotics and Computer-Integrated Manufacturing., vol. 29, pp. 100-112, 2012.
[8] M. A. Laribi, L. Romdhane and S. Zeghloul, “Analysis and dimensional synthesis of the DELTA robot for a prescribed workspace,” Mechanism and Machine Theory, vol. 42, pp. 859-870, 2007.
[9] FANUC Robotics, FANUC Robot M-2000iA Mechanical Unit Operators Manual, Rochester Hills, MI: FANUC America, 2014.
[10] S. Kucuk and Z. Bingul, Industrial Robotics: Theory, Modelling, and Control, Berlin, 2006.
[11] Y.-J. Chiu and M.-H. Perng, “Forward Kinematics of a General Fully Parallel Manipulator with Auxillary Sensors,” The International Journal of Robotics Research, 1 May 2001.
[12] L.-W. Tsai, Robot Analysis, New York: John Wiley & Sons, 1999.
[13] J.-H. Ryu, Parallel Manipulators, New Developments, I-Tech Education, 2008.
[14] E. A. Baran, T. E. Kurt and A. Sabanovic, Lightweight Design and Encoderless Control of a Minature Direct Drive Linear Delta Robot, Istanbul: Sabanci University.
[15] J. L. Irwin, J. M. Pearce, G. Anzolone and D. E. Oppliger, “The RepRap 3-D Printer Evolution in STEM Education,” in 121st ASEE Annual Conference & Exposition, Indianapolis, 2014.
Real-Time 3D Reconstruction of Dexterous Continuum Surgical Robots

Akarsh –
Great project. Just what I wanted.