
Description
Abstrsct :
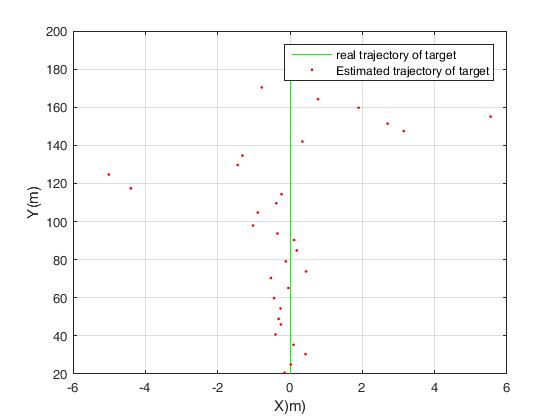
Vehicle technology has increased rapidly in recent years particularly in relation to sensing and braking systems. Topics of interest in this study are designing and simulation of data fusion in a radar network with overlaps. Data consolidation means combining output data of dissimilar radar sensors with different accuracy of range & angle error. These sensors installed at the front of the vehicle in one row for better detection of obstacles on the road. Each radar sensors sends self-reported data in the target position to the fusion center. We can be found better results for target location and velocity by applying data fusion algorithms. This procedure is error ratio reduction by applying KF&EKF on transmitted information and then check different types of sensor data fusion techniques (hierarchy & batch ) in two level of measurements and state vectors. The purpose of this research is tracking fusion to integrate coverage area and MSE assessment systems have been used to improve the accuracy of estimating the target position. The results show that positioning error of each sensor depends on radar accuracy and target position and also we increasing position accuracy with a large number of sensors. So that the positioning error of the fusion center less than positioning error of each sensor at the moment.
output :
![]()
![]()
![]()
![]()
![]()
references :
[5] Williams.Stefan B,Year 2009, Experimental Robotics , “data fusion and estimation “.
[6] Hall, David L., and Linas, James, Year1997, “An introduction to multisensor data fusion ” , Proceedings of the IEEE 85.1: 6-23.
[7] Duncan, Smith and Sameer, Singh, Year2006,” Approaches to Multisensor Data Fusion in Target Tracking Survey ” , IEEE Transaction on knowledge and data engineering, Vol.18 , No.12.
[8] Barwise , J., & Perry, J.Year1981, “Situations and attitudes” , The Journal of Philosophy, 78(11) , 668-691.
[9] Devlin, K. Year2006 ,”Situation theory and situation semantics” , Handbook of the History of Logic, 7, 601-664.
[10] Kokar, M. M., Matheus, C. J., & Baclawski. K.Year2009 ,”Ontology-based situation awareness” , Information fusion, 10(1), 83-98.
[11] Endsley, M. R. Year2000 , “Theoretical underpinnings of situation awareness: A critical review” , Situation awareness analysis and measurement, 3-32.
[12] Scholtz, J. C., Antonishek , B., & Young, J. D. Year2005 , “Implementation of a situation awareness“.
[13] Rivera, Mejia and Seanez, Hernandez and Hernandez, Lopez and Lopez, Perez,Year2011, “Intelligent sensor with data fusion to improve the care and management of water” In Instrumentation and Measurement Technology Conference (I2MTC),IEEE (pp. 1-5).
[14]N.J. Willis & H.D. Griffiths,Year2007, “Advances in Bistatic Radar” ,SciTech publishing, Inc.,U.S.A.
[15]J.Palmer, D. Merrett, S.Palumbo, J.Piyaratna, S.Capon, H Hansen,Year2008, “Illuminator of opportunity bistatic radar research at DSTO“, in Proc. International Conference on Radar, pp. 701_705.
[16] C. Baker,Year2009 “An Introduction to Multistatic radar“, NATO SET-136 Lecture Series on Multistatic Surveillance and Reconnaissance:Sensor, Signals and Data Fusion.
[17] R. Tenney and N. Sandels,Year1981 “Detection with distributed sensors“, IEEE Trans. on Aero. and Elect. Sys., Vol. 17, No. 4.
[18] J. N. Tsitsiklis,Year1993 “Decentralized detection“, Advances in Statistical Signal Processing, Signal Detection, Vol. 2, pp. 297-344.
[19] J. R. Raol,Year2010 “Multi-sensor data fusion with MATLAB“, CRC press.
[20] N. Milisavljević,Year2009 “Sensor and data fusion“, I-Tech Education and Publishing, Vienna, Austria.
[21] Y. Zhang, and H. Leung, and M. Blanchette, T. Lo, J. Litva,Year1997 “An Efficient Decentralized Multiradar multitarget Tracker for Air Surveillance“, IEEE Trans. on Aero. and Elect. Sys., Vol. 33, No. 4.
[22] M.S. Grewal and L.R. Weill and A. P. Andrews,Year2007 “Global Positioning Systems“, Inertial Navigation, and Integration, Second Edition, Appendix C, John Wiley & Sons.
[23] L.D. Stone, T. M. Tran, and M. L. Williams,Year2009 “Improvement in Track-to-Track Association from Using an Adaptive Threshold“, In 12th International Conference on Information Fusion .
[24] N. Shanthakumar, and G. Girij,Year2007 “Measurement level and state-vector data fusion implementations“, Personal communications and personal notes. Flight Mechanics and Control Division, National Aerospace Laboratories, Bangalore.
[25] H. Durrant-Whyte,Year2001 “Multi Sensor Data Fusion“, Course Notes, University of Sydney.
[26] X. Tian and Y. Bar-Shalom,Year2009 “Exact Algorithms for Four Track-to-Track Fusion Configurations: All You Wanted to Know but Were Afraid to Ask”, in Information Fusion, FUSION ’09, pp. 537 –544.
[27] K. V. Ramachandra,Year2002 “Kalman Filtering Techniques for Radar Tracking“, ISBN: 0-8247-9322-6, M, Marcel Dekker Inc., New York
[28] M. O. Kolawole,Year2002 “Radar Systems, Peak Detection and Tracking“, ISBN 0 7506 57731.
[29] M. Skolnik,Year2008 “Radar handbook “, 3rd Edition,by The McGraw-Hill, ISBN 978-0-07-148547-0.
[30] P. Lacomme, J.Philippe Hardange, J.Claude Marchais, and E. Normant,Year2001″Air and Space borne Radar Systems “, IEE ISBN: 0-85296-981-3, by William Andrew Publishing.
[31] E. Brookner,Year1998 “Tracking and Kalman filtering made easy”, John Wiley & Sons, Inc. ISBNs: 0-471-18407-1
[32] D. B. Reid,Year1979 “An algorithm for tracking multiple targets“, IEEE Transactions on Automatic Control AC-24, pp. 843-854.
[33]Y. Bar-Shalom, X. Rong Li, and T. Kirubarajan,Year2001″Estimation with Applications to Tracking Navigation: Theory, Algorithms, and software“, ISBN 0-471-41655-X, John Wiley & Sons Publication.
[34] Mahafza, B. R,Year2000 “Radar Systems Analysis and Design using MATLAB“, FL, CRC Press.
[35] Kosuge Y, and M. Ito,Year2001 “A Necessary and Sufficient Condition for the Stability of an α-β-γ Filter”, SICE2001, Proceeding of the 40th Annual Conference, International Session Letters, pp. 52-57.
[36] Cohen S.A,Year1986 “Adaptive Variable Update Rate Algorithm for Tracking Target with a Phased-Array Radar”, IEE Proceedings F, Vol. 133, NO. 3, pp. 177-180.
[37] Jeffer A. J, and Y. Bar-Shalom,Year1972 “On optimal Tracking in Multiple Target environment”, Proceeding of Third Symposium on Non-Linear Estimation Theory and its Application, San Diego, CA, pp. 112-117.
[38] A. H. Jazwinski,Year1970 “Stochastic Processes and Filtering Theory“, Academic Press, New York.
[39] Bogler, P. L,Year1990″ Radar Principles with Application to Tracking Systems”, NY, John Wiely and Sons.
[40] Bar-Shalom Y, and T.E. Jortman,Year1988 “Tracking and Data Association“, NY, Academic Press.
[41] X. Rong Li, and Vesselin P. Jilkov, X.,Year2003 “Survey of Maneuvering Target Tracking“. Part I: Dynamic Models, IEEE Transactions on Aerospace and Electronic Systems Vol.39, No4.
[42] H. A. P. Blom,Year1985 “An efficient decision-making-free filter for processes with abrupt Changes”, In Proceedings of International Federation of Automatic Control Symposium on Identification and System Parameter Estimation, York, United Kingdom, pp. 631-636.
[43] Kalata P. R,Year1984 “The Tracking Index: A Generalized Parameter For α-β and α-β-γ Target Trackers“, IEEE Transactions on Aerospace and Electronic Systems, AES 20, pp. 174-182.
[44] Simon J. Julier Jerrey K. Uhlmann,Year1990 “A New Extension of the Kalman Filter to Nonlinear Systems“.
[45] H. A. P. Blom and Y. Bar-Shalom,Year1988 “The interacting multiple model algorithm for systems with markovian switching coefficients“, IEEE Transactions on Automatic Control vol. 33, no. 8, pp. 780-783.
[46] E. Mazor, A. Averbuch, Y. Bar-Shalom, and J. Dayan,Year1998 “Interacting multiple model methods in target tracking: A survey“, IEEE Transactions on Aerospace and Electronic Systems, vol. 34, no. 1 , pp. 103-123.
[47] M. S. Woolfson,Year1985 “An evaluation of maneuver detector algorithms“, GEC Journal of Research, vol. 3, no. 3, pp. 181-190.
[48] Yaakov Bar-Shalom,Year1990 “Multi-target Multi-sensor tracking: Advanced applications“, Artech House, Norwood, MA.
[49] T. Kirubarajan, Y. Bar-Shalom, W. D. Blair, and G. A. Watson,Year1998 “IMM PDA Solution to Benchmark for Radar Resource Allocation and Tracking in the Presence of ECM”, IEEE Trans. Aerospace and Electronic Systems, 34(3), 1023–1036.

Reviews
There are no reviews yet.