
Description
This code presents a method for extracting distinctive invariant features from images that can be used to perform reliable matching between different views of an object or scene. The features are invariant to image scale and rotation and are shown to provide robust matching across a substantial range of affine distortion, change in 3D viewpoint, addition of noise, and change in illumination.
The features are highly distinctive, in the sense that a single feature can be correctly matched with high probability against a large database of features from many images. This paper also describes an approach to using these features for object recognition. The recognition proceeds by matching individual features to a database of features from known objects using a fast nearest-neighbor algorithm, followed by a Hough transform to identify clusters belonging to a single object, and finally performing verification through the least-squares solution for consistent pose parameters. This approach to recognition can robustly identify objects among clutter and occlusion while achieving near real-time performance.
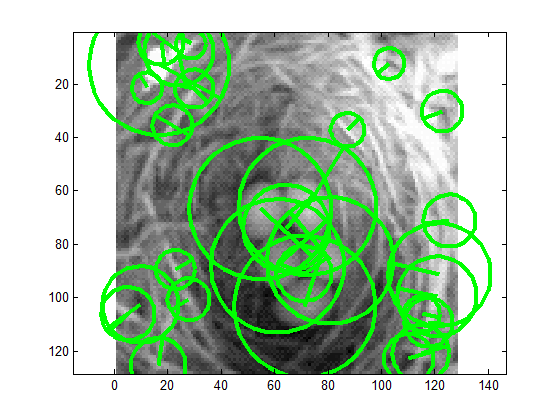
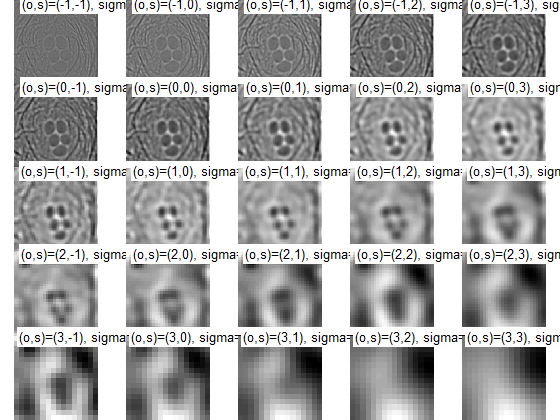
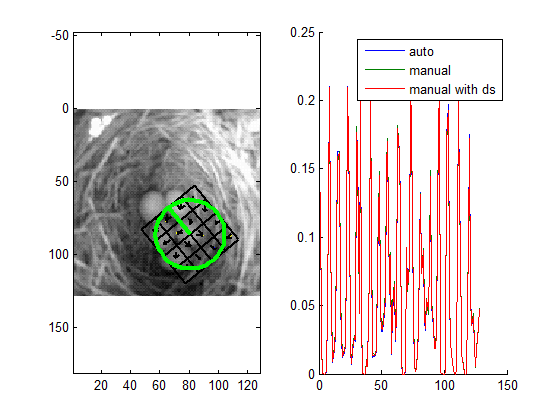
the output of code:



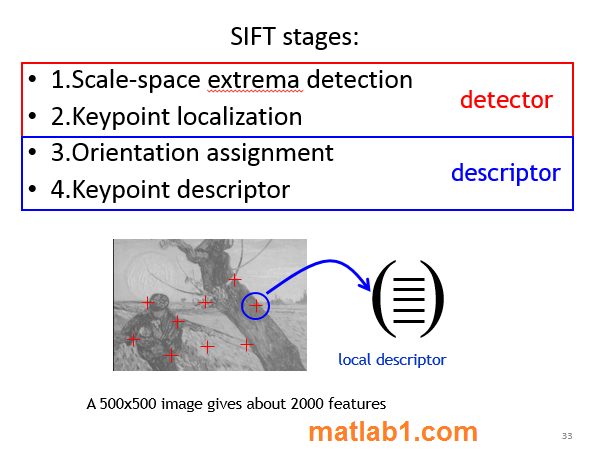
This code has a power point file that describe this code.
Outline
- Why do we care about matching features?
- Problem Statement
–Properties of features
–Types of invariance
- Introduction to feature matching
–Matching using invariant descriptors
- Feature Detection
»Moravec, harris
»Harris properties (rotation, intensity, scale invariance)
–Low’s key point
–SIFT (Scale Invariant Feature Transform)
–SIFT Extensions: PCA-SIFT, GLoH ,SPIN image, RIFT,
- Feature matching
- Application (examples)
- Future Works
- Conclusion
Reference
- Chris Harris, Mike Stephens, A Combined Corner and Edge Detector, 4th Alvey Vision Conference, 1988, pp147-151.
- David G. Lowe, Distinctive Image Features from Scale-Invariant Keypoints, International Journal of Computer Vision, 60(2), 2004, pp91-110.
- Yan Ke, Rahul Sukthankar, PCA-SIFT: A More Distinctive Representation for Local Image Descriptors, CVPR 2004.
- Krystian Mikolajczyk, Cordelia Schmid, A performance evaluation of local descriptors, Submitted to PAMI, 2004.
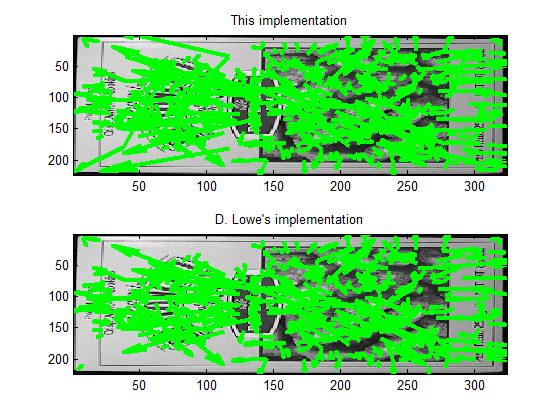
- SIFT Keypoint Detector, David Lowe.
- Matlab SIFT Tutorial, University of Toronto.
- “Local Invariant Feature Detectors: A Survey”, Tinne Tuytelaars and Krystian Mikolajczyk, Computer Graphics and Vision, Vol. 3, No. 3 (2007) 177–280
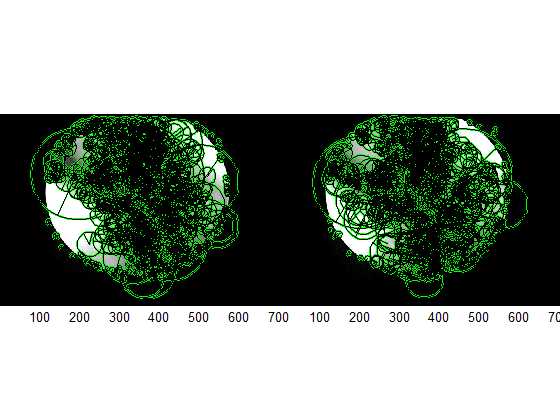
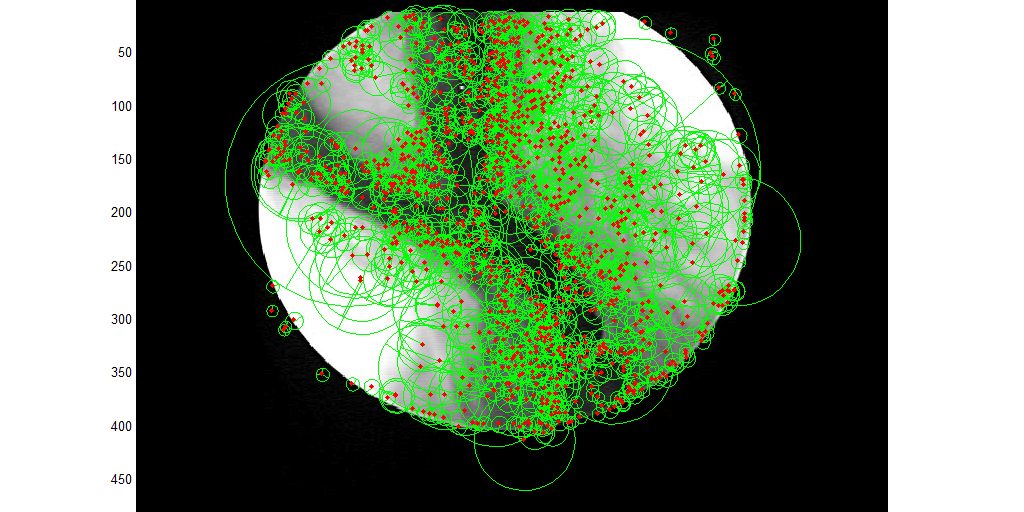
output :
Computing frames and descriptors.
SIFT: computing scale space…(4.557 s gss; 0.252 s dogss) done
SIFT scale space parameters [PropertyName in brackets]
sigman [SigmaN] : 0.500000
sigma0 [Sigma0] : 2.015874
O [NumOctaves] : 6
S [NumLevels] : 3
omin [FirstOctave] : -1
smin : -1
smax : 3
SIFT detector parameters
thersh [Threshold] : 5.000000e-03
r [EdgeThreshold] : 10.000
SIFT descriptor parameters
magnif [Magnif] : 3.000
NBP [NumSpatialBins]: 4
NBO [NumOrientBins] : 8
SIFT: processing octave -1
SIFT: 1268 initial points (0.560 s)
SIFT: 1268 away from boundary
SIFT: 738 refined (0.028 s)
SIFT: computing descriptors…done (4.068 s)
SIFT: processing octave 0
SIFT: 560 initial points (0.134 s)
SIFT: 552 away from boundary
SIFT: 316 refined (0.006 s)
SIFT: computing descriptors…done (1.392 s)
SIFT: processing octave 1
SIFT: 114 initial points (0.034 s)
SIFT: 110 away from boundary
SIFT: 76 refined (0.000 s)
SIFT: computing descriptors…done (0.344 s)
SIFT: processing octave 2
SIFT: 24 initial points (0.010 s)
SIFT: 22 away from boundary
SIFT: 14 refined (0.000 s)
SIFT: computing descriptors…done (0.071 s)
SIFT: processing octave 3
SIFT: 6 initial points (0.004 s)
SIFT: 5 away from boundary
SIFT: 5 refined (0.000 s)
SIFT: computing descriptors…done (0.025 s)
SIFT: processing octave 4
SIFT: 4 initial points (0.001 s)
SIFT: 0 away from boundary
SIFT: 0 refined (0.000 s)
SIFT: computing descriptors…done (0.003 s)
SIFT: computing scale space…(4.197 s gss; 0.252 s dogss) done
SIFT scale space parameters [PropertyName in brackets]
sigman [SigmaN] : 0.500000
sigma0 [Sigma0] : 2.015874
O [NumOctaves] : 6
S [NumLevels] : 3
omin [FirstOctave] : -1
smin : -1
smax : 3
SIFT detector parameters
thersh [Threshold] : 5.000000e-03
r [EdgeThreshold] : 10.000
SIFT descriptor parameters
magnif [Magnif] : 3.000
NBP [NumSpatialBins]: 4
NBO [NumOrientBins] : 8
SIFT: processing octave -1
SIFT: 1220 initial points (0.467 s)
SIFT: 1220 away from boundary
SIFT: 701 refined (0.007 s)
SIFT: computing descriptors…done (3.866 s)
SIFT: processing octave 0
SIFT: 524 initial points (0.125 s)
SIFT: 514 away from boundary
SIFT: 290 refined (0.005 s)
SIFT: computing descriptors…done (1.294 s)
SIFT: processing octave 1
SIFT: 127 initial points (0.035 s)
SIFT: 120 away from boundary
SIFT: 93 refined (0.000 s)
SIFT: computing descriptors…done (0.393 s)
SIFT: processing octave 2
SIFT: 28 initial points (0.009 s)
SIFT: 24 away from boundary
SIFT: 19 refined (0.000 s)
SIFT: computing descriptors…done (0.081 s)
SIFT: processing octave 3
SIFT: 5 initial points (0.002 s)
SIFT: 4 away from boundary
SIFT: 3 refined (0.000 s)
SIFT: computing descriptors…done (0.018 s)
SIFT: processing octave 4
SIFT: 5 initial points (0.001 s)
SIFT: 0 away from boundary
SIFT: 0 refined (0.000 s)
SIFT: computing descriptors…done (0.003 s)
Computing matches.
Matched in 1.377 s

Reviews
There are no reviews yet.