
Description
The surface electromyogram (sEMG) is strongly related to human motion and is useful as a human interface in robotics and rehabilitation.
The purpose of this MATLAB code is to propose a new system for estimating a parameter from sEMG channels.
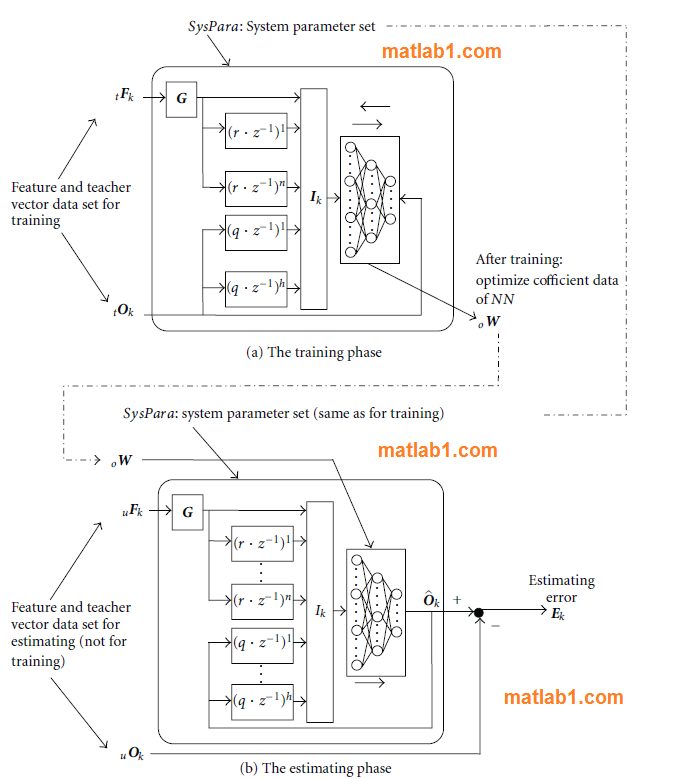
To deal with a dynamic system, the proposed method adopts time delay factors and a feedback stream into a neural network (NN).
You can use this code for any other purpose.
The main core of this code is recurrent structure of neural network.
Our reference for this code in following paper :
Hioki, Masaaki, and Haruhisa Kawasaki. ” Estimation of finger joint angles from sEMG using a neural network including time delay factor and recurrent structure.” ISRN Rehabilitation 2012 (2012).
you can download this paper from here :

The training phase and estimating phase are in the following figure :

Reviews
There are no reviews yet.