
Description
By analyzing the moment features of the weight image of the target candidate region and the Bhattacharyya coefficients, we developed a scale and orientation adaptive mean shift tracking (SOAMST) algorithm.
It can well solve the problem of how to estimate robustly the scale and orientation changes of the target under the mean shift tracking framework. The weight of a pixel in the candidate region represents its probability of belonging to the target, while the zeroth order moment of the weights image can represent the weighted area of the candidate region.
By using the zeroth order moment and the Bhattacharyya coefficient between the target model and the candidate model, a simple and effective method to estimate the target area was proposed. Then a new approach, which is based on the area of the target and the corrected second order center moments, was proposed to adaptively estimate the width, height and orientation changes of the target.
The proposed SOAMST method inherits the merits of mean shift tracking, such as simplicity, efficiency and robustness. Extensive experiments were performed and the results showed that SOAMST can reliably track the objects with scale and orientation changes, which is difficult to achieve by other state-of-the-art schemes. In the future research, we will focus on how to detect and use the true shape of the target, instead of an ellipse or a rectangle model, for a more robust tracking.
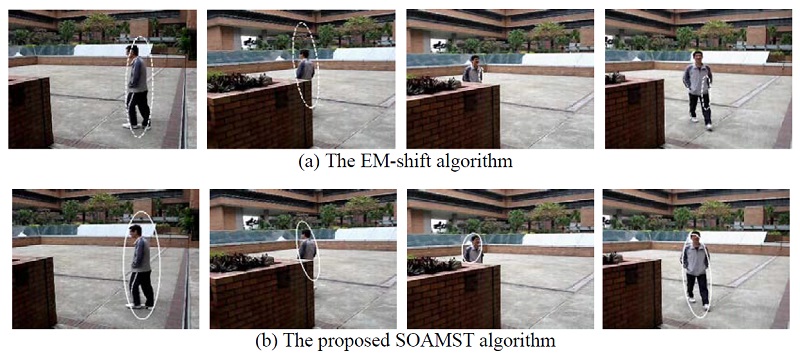

Tracking results of the car sequence by different tracking algorithms.
ref :
Ning, Jifeng, Lei Zhang, David Zhang, and Chengke Wu. “Scale and orientation adaptive mean shift tracking.” IET Computer Vision 6, no. 1 (2012): 52-61.
Ardunio code for estimation of orientation or attitude of a moving rigid body
Reviews
There are no reviews yet.