
Description
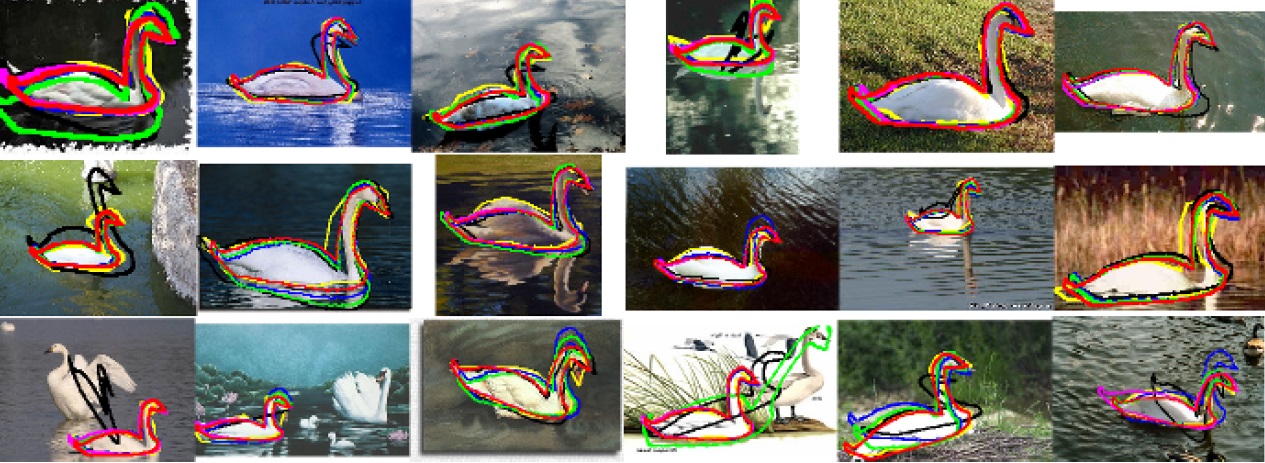
To address the problem of rotation invariant nonrigid point set matching, we proposed two methods for shape representation. The shape context (SC) feature descriptor was used and we constructed graphs on point sets where edges are used to determine the orientations of SCs. This enables the proposed methods rotation invariant. The structures of our shape representations facilitate the use of DP for optimization.
The strong discriminative nature of SC, the calculated robust orientations of SCs, and the global optimality of DP make our methods robust to various types of disturbances, particularly clutters.
The proposed methods were tested on both synthetic and real data in comparison with several representative methods. The results show that our methods, especially MSTT, clearly outperform other methods in terms of robustness against clutter. The proposed methods are very useful for tasks involving detection and matching of shapes in cluttered scenes where the initial poses of the shapes may not be known.
ref :
Lian, W., Zhang, L., & Zhang, D. (2012). Rotation-invariant nonrigid point set matching in cluttered scenes. IEEE transactions on image processing, 21(5), 2786-2797.
Transform rotation matrix into rotation vector and viceversa
Basis rotation algorithm for approximating the maximum likelihood filters in natural images

Reviews
There are no reviews yet.