Description
One of the problems in the control valve is stiction. This problem is shown in the following figure:
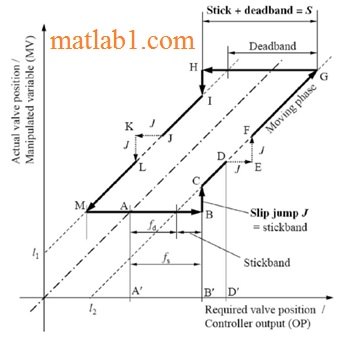
It consists of four components: dead band, stick band, slip jump and the moving phase.
Stiction is the static friction that needs to be overcome to enable relative motion of stationary objects in contact. The term is a portmanteau of the term “static friction“, perhaps also influenced by the verb “stick“.
The presence of nonlinearities, e.g., stiction, and dead band in a control valve limits the control loop performance. Stiction is the most commonly found valve problem in the process industry.
We produce data for our algorithm by following Simulink model:

This Simulink model is made based on the following paper :
Choudhury, M. S., Thornhill, N. F., & Shah, S. L. (2005). Modelling valve stiction. Control engineering practice, 13(5), 641-658.Chicago.
The user can determine the magnitude of stick band/stiction (s) and magnitude of slip-jump (j) in the Simulink model.
We extract features from the output signal. Then Support Vector Machine (SVM) is used for stiction detection.
After training SVM, We use trained SVM for stiction detection in test data. SVM can detect stiction and dead band.
Power System Simulation Toolbox (PSST)
Reviews
There are no reviews yet.