
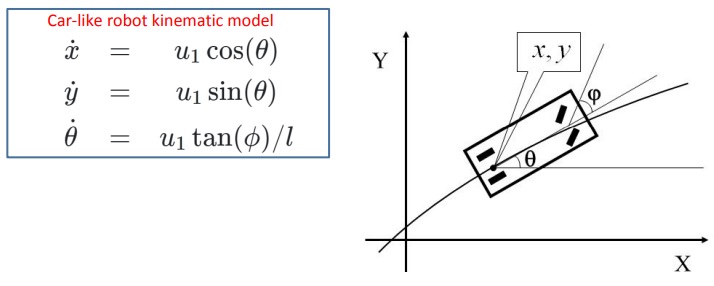
Description
The kinematics of Car-like robots is the same as that of bicycles
• Front wheel for steering
• Rear wheel for driving
Definitions:
• Reference point: the middle of the two driving wheels [(x, y) in the figure]
• Steering angle phi (see figure)
• Heading angle theta (see figure)
• Average speed of the driving wheel u1
• Length between the front-wheel axis and rear-wheel axis: l
Remark: For a car, phi defines the angle of the steering wheel, while theta defines the heading angle of your car.
Swedish Wheel (Mecanum wheel) for Omnidirectional Robots
Car-like robots and differential drive robots do not allow side-slip, but Swedish wheeled robots allow.
We can use Swedish wheels to construct omnidirectional robots.
Swedish wheels are widely used.

MATLAB Simulink Swedish wheel
The roller is mounted on the wheel. So, roller speed is the composition of the wheel speed (provided by the motor) and the slipping speed of the roller along its axis.
For the three-wheel robot as shown in the figure, reference point (x, y): the center of the robot Heading angle theta: the heading angle of wheel 1 Robot size l: edge length of the triangle formed by the three wheels.
Reviews
There are no reviews yet.