
Description
We implemented a novel and efficient method for representing and matching nonrigid shapes. The representation is invariant to translational and rotational changes, and by using a powerful feature descriptor and a new feature distance measure, it is also robust to non-rigid deformations and outliers. An algorithm was then proposed to solve the point matching problem, which possesses global optimality and is very robust against clutters. The proposed method was tested by using both simulated and real data in comparison with 3 state-of-the-art and representative methods. The results clearly demonstrated that the proposed method has high capability in detecting and matching shapes in cluttered scenes.
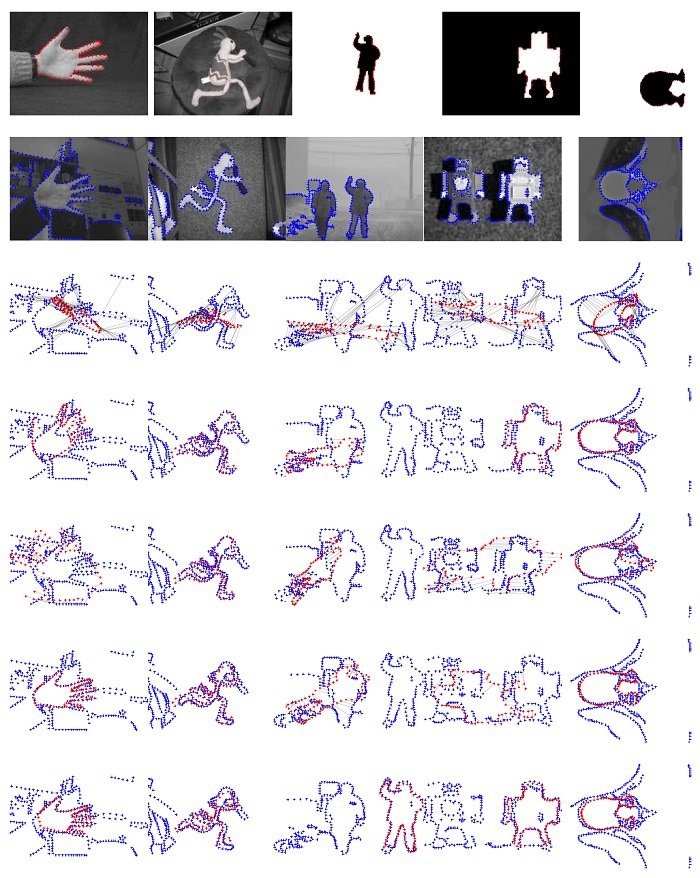
Examples of point matching with data acquired from images
Lian, Wei, and Lei Zhang. “Rotation invariant non-rigid shape matching in cluttered scenes.” European Conference on Computer Vision. Springer, Berlin, Heidelberg, 2010.
Monogenic-LBP: A new approach for rotation invariant texture classification

Reviews
There are no reviews yet.