Description
➢ Inputs: u1 (throttle control), phi (steering control)
➢ Outputs: x, y, theta
We cannot drive the robot to move at the speed (vxd, vyd) along the rear wheel axis direction as side slip is not possible.
➢ Similar to DD robot, we can set a new reference point to overcome this issue.
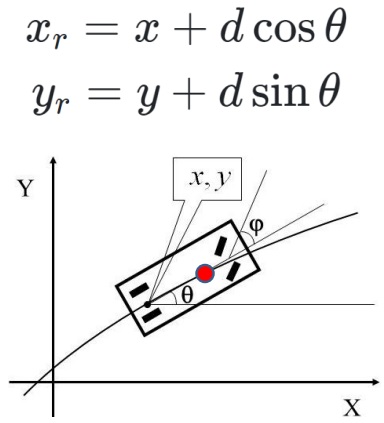
➢ New Reference Point (xr, yr):
Control of Car-like Robots
The new reference point (xr, yr) (the red spot in the figure). Note the new reference point is along the central line of the robot with a length from the old reference point for d.
The kinematics of the reference point can be obtained as

Define u2=u1*tan(phi), the above equations become
In matrix form,
Reviews
There are no reviews yet.