Description
MATLAB and Simulink file mobile robot control based on Differential Drive (DD).
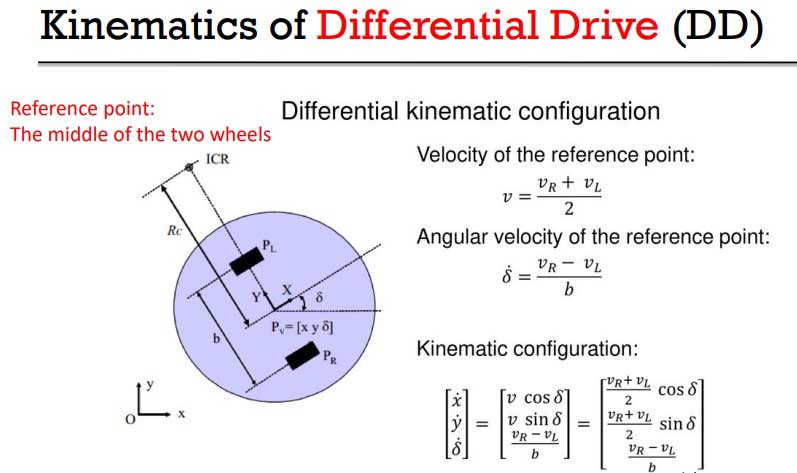
Kinematics of Differential Drive (DD):

Where
v: the speed of the reference point;
x, y: the position of the reference point in 2D plane.
delta: the heading angle of the robot (see figure).
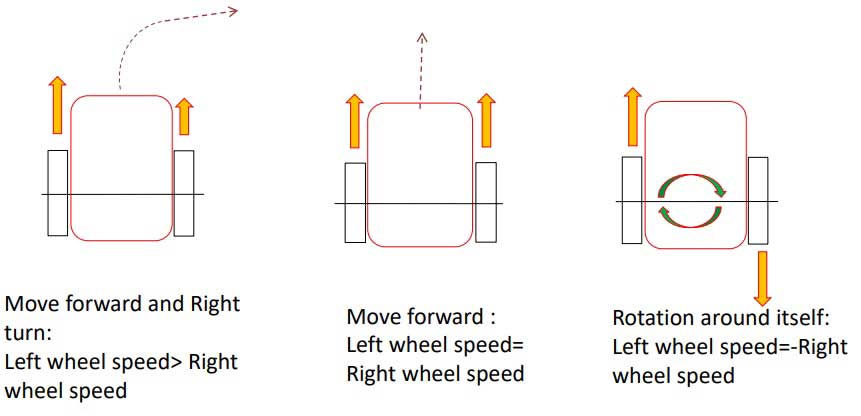
vR: Right wheel speed (positive: move forward; negative: move backwards)
vL: Left wheel speed;
b: length between two wheels (see figure)
Simulation Results :
Reviews
There are no reviews yet.