Rapid Control Prototyping (RCP) and Hardware-in-the-Loop (HIL) are two methodologies used in the development and testing of control systems. While they share some similarities, they are distinct processes that serve different purposes in the control system development process.
Rapid Control Prototyping (RCP) is a methodology used to quickly iterate and test control algorithms using a software-based prototype system. In RCP, a controller is implemented on a real-time target hardware platform that is capable of running real-time software, such as a microcontroller or FPGA. The algorithm is then tested using simulation models of the physical system it is designed to control. This allows engineers to quickly iterate and refine the control algorithm in a software environment before moving on to hardware implementation.
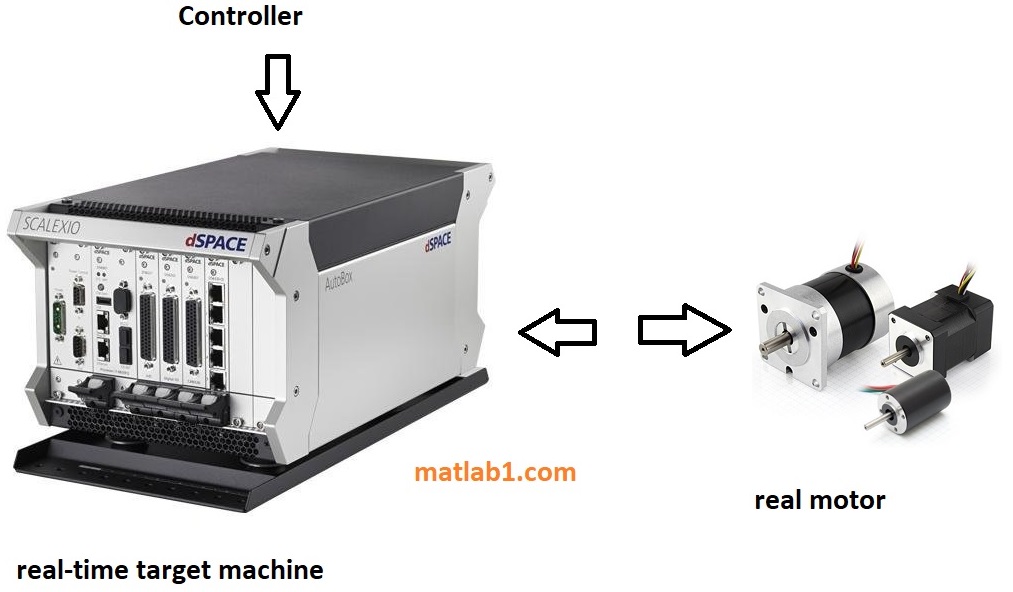
Rapid Control Prototyping
In RCP, the controller is downloaded to a real-time target machine and the plant is real. A real motor, for example.
Hardware-in-the-Loop (HIL), on the other hand, is a methodology used to test control algorithms in a hardware environment that closely resembles the actual physical system. In HIL testing, the control algorithm is implemented on the real hardware of the controller, which is then connected to a hardware emulator that simulates the behavior of the physical system. The system response is then measured and fed back to the controller in real time, allowing the control algorithm to be tested under realistic conditions.
In HIL, the Plant is downloaded to a real-time target machine and the controller is real (real ECU).
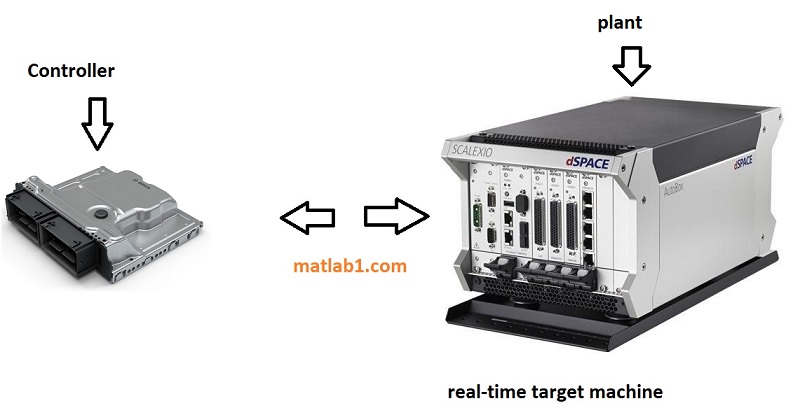
Hardware-in-the-Loop (HIL)
