Large Scale Charging in Distribution System
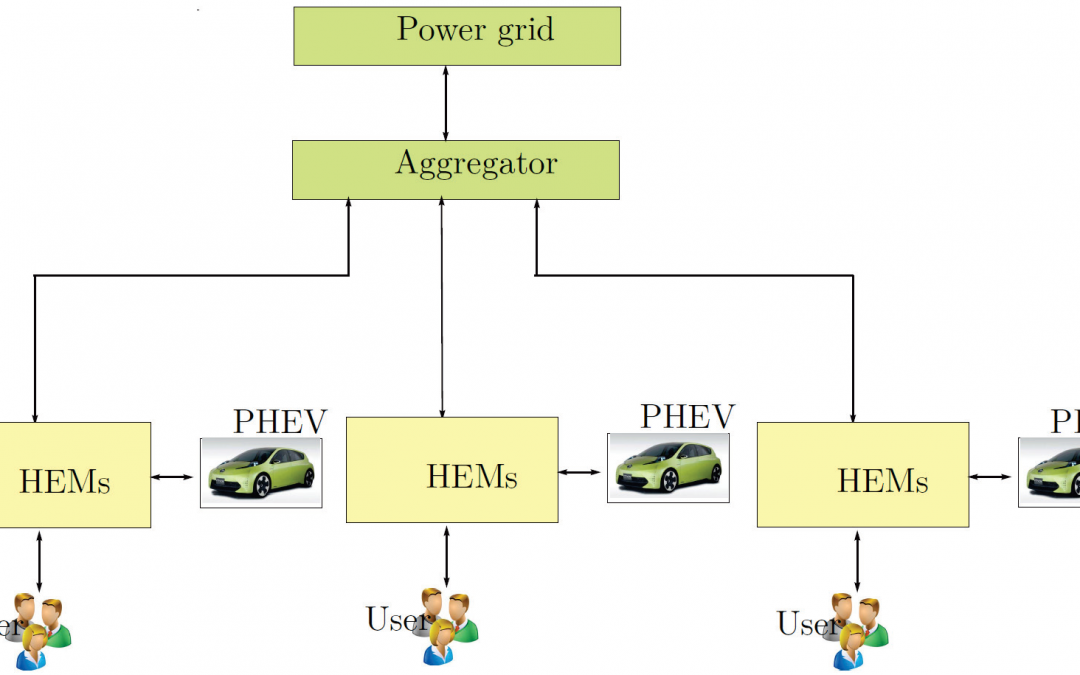
In this section, we discuss the framework of the large-scale EV charging in a distribution system. As shown in Figure 2.7, EVs are attached to residential houses or public chargers distributed in a wide area. A service aggregator, who purchases power from the grid and supply the charging services, connects the power grid and EV customers. EVs communicate the charging scheduling and charging prices with the aggregator through the chargers. The aggregator collects information of multiple chargers and receives the information about the power grid, including the power limit, wholesale energy price, and ancillary service requirement. Based on the information, the aggregator optimally schedules the charging of EVs by directly sending the control signal or affects the charging decision of EVs indirectly by price signals.
For large-scale EV charging, there are two ways of scheduling, centralized (direct) control, and decentralized (indirect) control. The centralized control framework assumes the scheduler has direct access to each EV and can make a direct decision on the charge scheduling. This structure requires more computational power and information communication between EVs and the aggregator.
On the other hand, this framework is more likely to achieve optimality. In the centralized framework, assuming the future information about the EVs and the power grid is available, it is shown that the optimal solution satisfies the valley-filling property. A valley-filling aggregate charging schedule schedules more EVs when the total electricity demand (or equivalently, the electricity price) is low to fill the valley and minimize the charging cost.
The decentralized framework shares the same presence and goals of the aggregator/scheduler with the centralized control. The difference is the information and where the charging schedules are calculated. In the decentralized charging framework, the scheduler acts as a coordinator that designs the incentive structure so that the scheduling of EVs minimizes the total cost or achieves other goals of the aggregator. Each EV makes provisional charging decisions and determines its charging schedule according to the aggregator incentives.
The decentralized framework distribute the computation burden from the scheduler to individual EV chargers. Each charger solves a much smaller scale problem which relieves the computation cost brought by the large population of EVs. Another benefit is the privacy of the EVs. EVs may be reluctant to upload details of their demand directly to the aggregator. In the decentralized framework, no information but the proposed charging profile of each EV is given out. Despite of these advantages, the stability and optimality of the decentralized charging remain unclear. EVs tend to cluster the charging schedule to the valley of the price which potentially brings up the total cost and lead s to unstable scheduling process. One approach to overcome the instability is to impose penalty of changing charging profiles in the incentives. Besides the charging cost, the aggregator penalizes the EVs who dramatically changes their charging plan or deviates from the trend of the total charging profile. Under some conditions, the outcome of the decentralized algorithms converges to the optimal solution under the centralized framework.
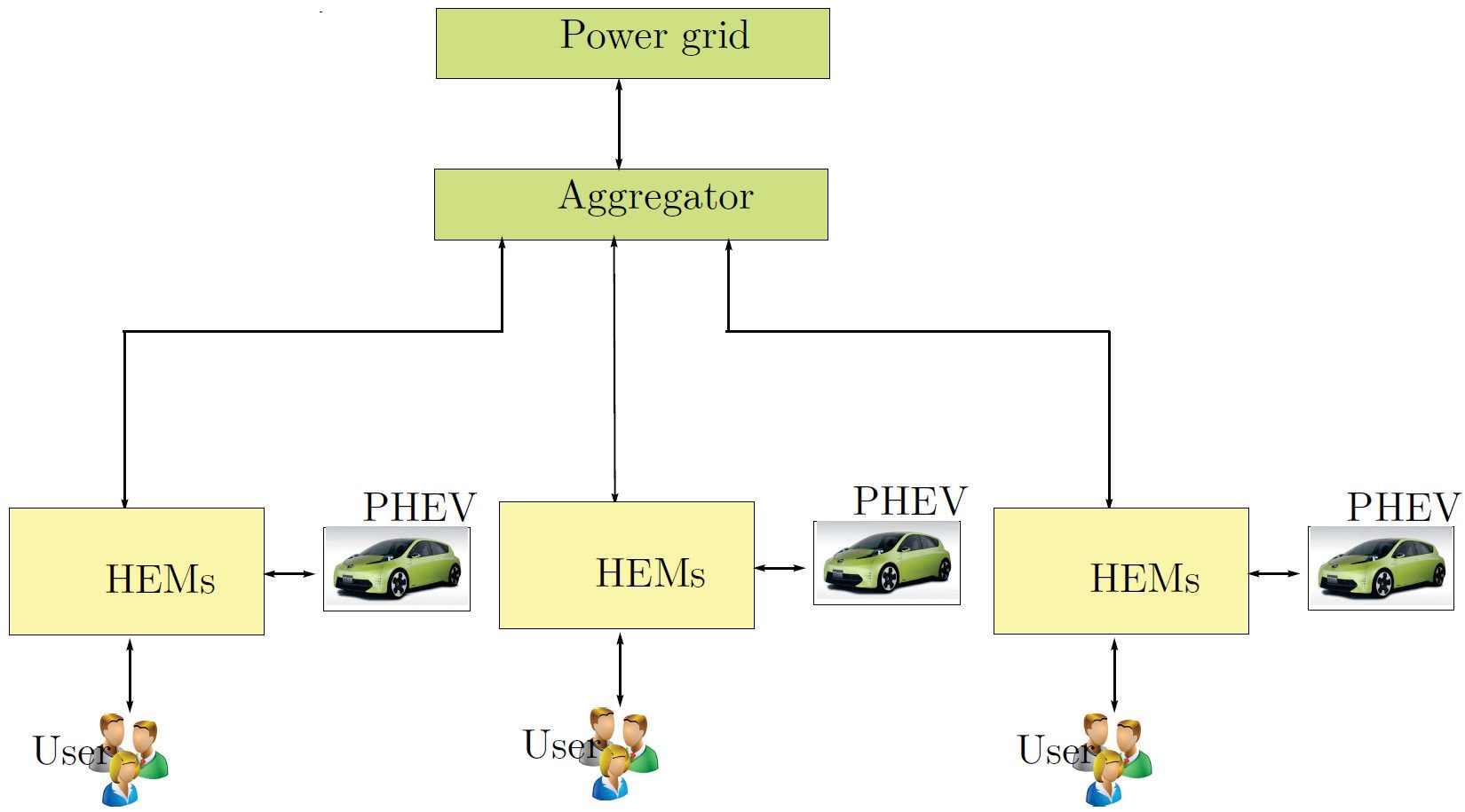
Figure 7: Architecture of home energy management system
